Thông số kỹ thuật của robot cộng tác – cobot trong ngành lương thực và nông nghiệp:
Trọng lượng hộp điều khiển: 15,5kg
Kích thước hộp điều khiển: 420 x 360 x 222 mm
Nguồn điện hộp điều khiển: 24 V 3 A / 5 V 120 mA / 5 V 120 mA
Kết nối của hộp điều khiển: EtherCAT / Ethernet / DIO (32ch) / AIO (4ch) / RS485 / RS232 / CAN
Tải trọng tối đa: 7 kg
Trọng lượng robot: 29kg
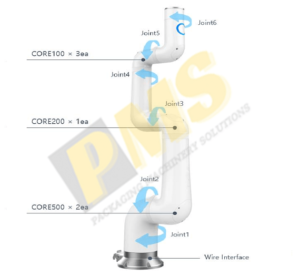
Tầm với tối đa: 800 mm (Từ khớp thứ 2 đến khớp thứ 5)
Khớp phạm vi chuyển động khớp: 1,2,3,4,5: ± 175˚, khớp 6: ± 215˚
Vận tốc khớp tối đa: Khớp 1,2,3 : 150 ° / s ; Khớp 4,5,6 : 180 ° / s
Tốc độ chạy tối đa: 1 m / s
Độ lặp lại: ± 0,05mm
Chân in: Φ 205 mm
Mức độ tự do: 6 khớp quay vòng
Cổng IO công cụ
Tín hiệu: DO (24 V 1ch để điều khiển bộ kẹp) / CAN / RS485 / EtherCAT
Lập trình ContyTM: giao diện người trên thiết bị máy tính bảng, Android
Công suất tiêu thụ: Khoảng 700W
Vật liệu chính: Hợp kim nhôm
Phạm vi nhiệt độ 0-50 ° C
Nguồn điện cobot: 100 ~ 240 VAC, 50 ~ 60 Hz
Cáp nguồn (Từ ổ cắm điện đến hộp điều khiển): 5 m
Cáp giao tiếp (Từ hộp điều khiển đến rô bốt): 5 m
Cáp khẩn cấp (Từ hộp điều khiển đến nút khẩn cấp): 5m
Tiêu chuẩn an toàn:
ISO10218-1: 2001
ISO12100: 2010
Chỉ thị Máy móc 2006/42 / EC
Chỉ thị về khả năng tương thích điện từ 2014/30 / EU